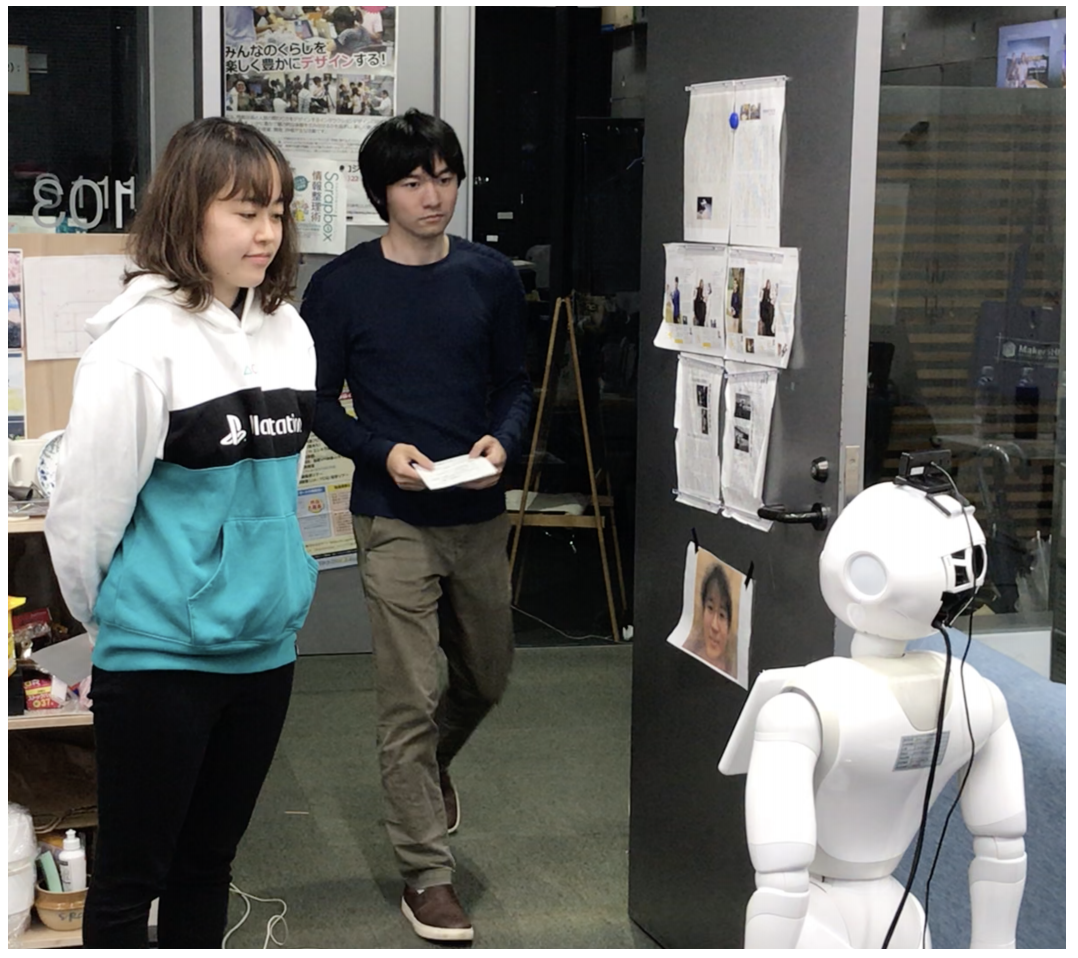
Telepresence robots using traditional video chats don’t make remote user’s presence fully yet. In order to enhance remote user’s presence, we propose a novel approach for telepresence robots, which replaces remote user’s background with the real time captured image behind the robot. We supposed that the background of the remote user that displayed on telepresence robot’s display is one of the reason for reducing presence. We found the approach is effective to enhance the presence of remote users and to reduce bad impression for delay. By existing remote user’s background, it may remind ”Remote users are in another place.” to people talking with telepresence robots clearly. In this paper, we explain the new approach, implementation and evaluation of the system. We developed and evaluated a system which replaces remote user’s background with the real time background where robots placed and evaluated subjective impressions of communication through the system.
Telepresence Robot that Enhances the Physical Presence of Remote User : furuyan