In this study, we analyzed what kind of animal-like qualities are important in the acceptance of partner robots in households. The questionnaire surveyed the animal-like qualities of visual, auditory and tactile elements, and analyzed the relation between the partial animal-like qualities of each element and the duration of use. We also showed what aspects of the robot’s animal-like nature the user perceived by analyzing the relationship between the animal-like nature of each element of the robot and the sense of living things.
The results suggest that items such as the intelligence of the robot and the animal-like shape of the robot might be factors in acceptance. It was also suggested that the smoothness of the robot’s movement and the animal-like sound of the volume other than the robot’s voice were factors that made users feel a sense of living-likeness toward the robot.
A Feasibility Study of An Intelligent Environmental Monitoring System Based On The Ethereum Blockchains, Cheng Yiyang, Kazunori Takashio, 2021 International Conference on Information and Communication Technology Convergence (ICTC 2021), pp. 435-439, doi: 10.1109/ICTC52510.2021.9621007.
In today’s era, the security and authenticity of information have always received extensive attention, especially when people have doubts about the authenticity of data. Hence, a traceable data storage platform with the feature that theoretically cannot be tampered with becomes extremely important. Under such demands, the deployment of smart contracts can effectively trace the source and discover problems. This article introduces an environmental data detection platform based on blockchain technology and smart contracts. It aims to record the data continuously and verify the authority of each transaction.
(日本語) テレプレゼンスロボットにおける遠隔ユーザの身体性を考慮した表示手法の検討, 古谷優樹, 高汐一紀, 信学技報, vol. 121, no. 93, CNR2021-3, pp. 8-13, 2021年7月.
Sorry, this entry is only available in Japanese.
Novel Robotics Design
Outline
Robots are used in a wide variety of fields to satisfy different requirements and problems. There are various designs, actuators, and mechanisms of robots, and it is difficult to design the most suitable design and mechanism to match the required requirements. Therefore, in this study, the purpose is to obtain the optimal design and structure required by applying the algorithmic design method to the design and mechanism of robots. Also, this research will pursue the design suitable for human-robot interaction toward the realization of a society in which humans and robots can collaborate.
Vision
Recent improvements in computing capacity have made it possible to move robots on simulations and to learn their behavior using reinforcement learning. By using such calculations on simulations, it will be possible to design complex robots more easily and to obtain the optimal design for each robot, which cannot be achieved by just designing by humans. Also, like the 3D printers of today, it is expected that a society where individuals can design and build robots to deal with familiar problems easily, even for beginners.
Project Research
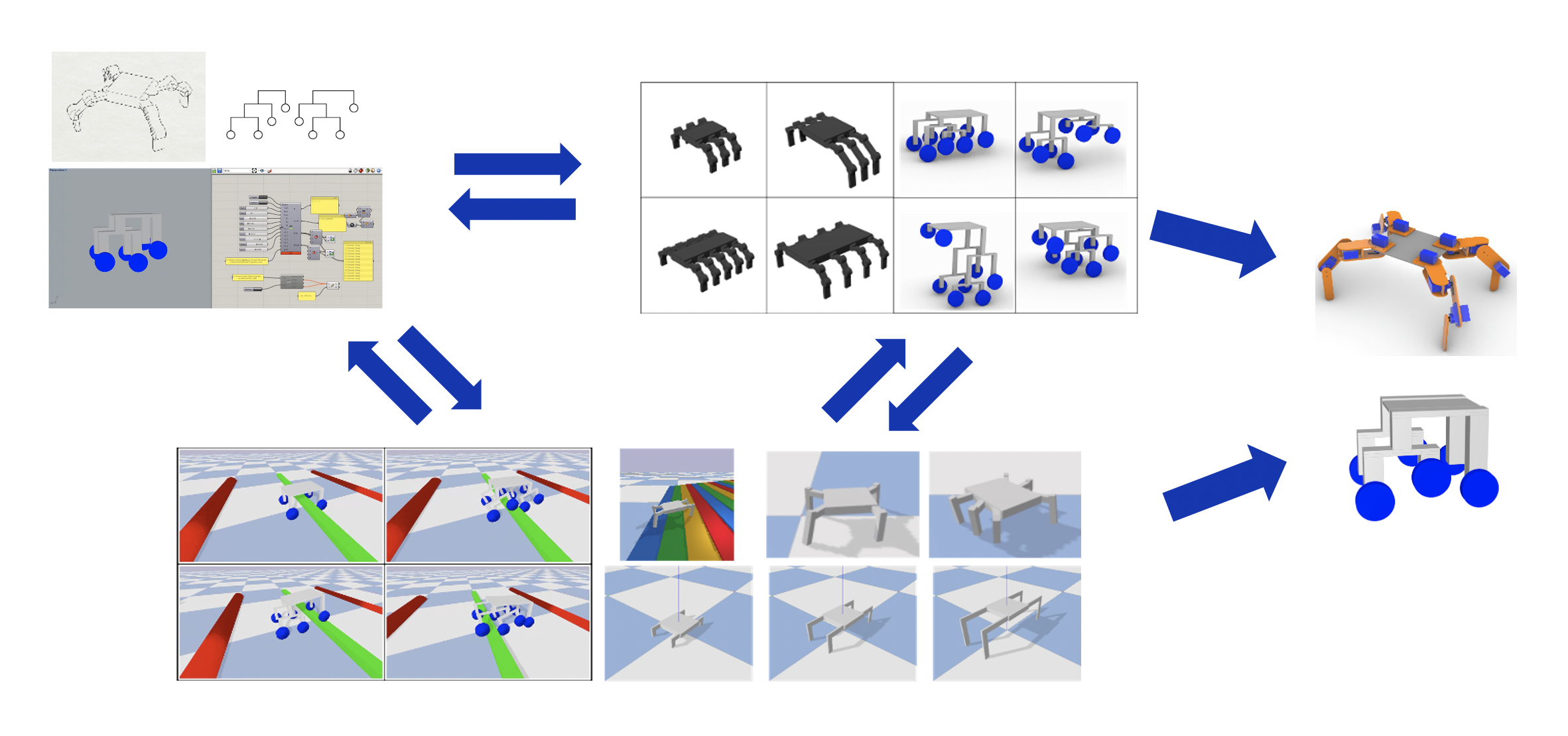
Development of Algorithmic Robot Design Method
Robots have a wide variety of forms and functions. It is strenuous to design a comprehensive robot that could satisfy general requirements. In this study, I proposed and developed the “Algorithmic Robot Design Method,” which applies the algorithmic design method to the model and mechanism of robots. The methodology aims to obtain the optimal design and structure required for each robot under various conditions, considering the motion and behavior of the robot and actuators, and the evaluation by the user.
Publication
MITOU program 2020
https://www.ipa.go.jp/jinzai/mitou/2020/gaiyou_tn-3.html
Motivating for Human Behavior
Outline
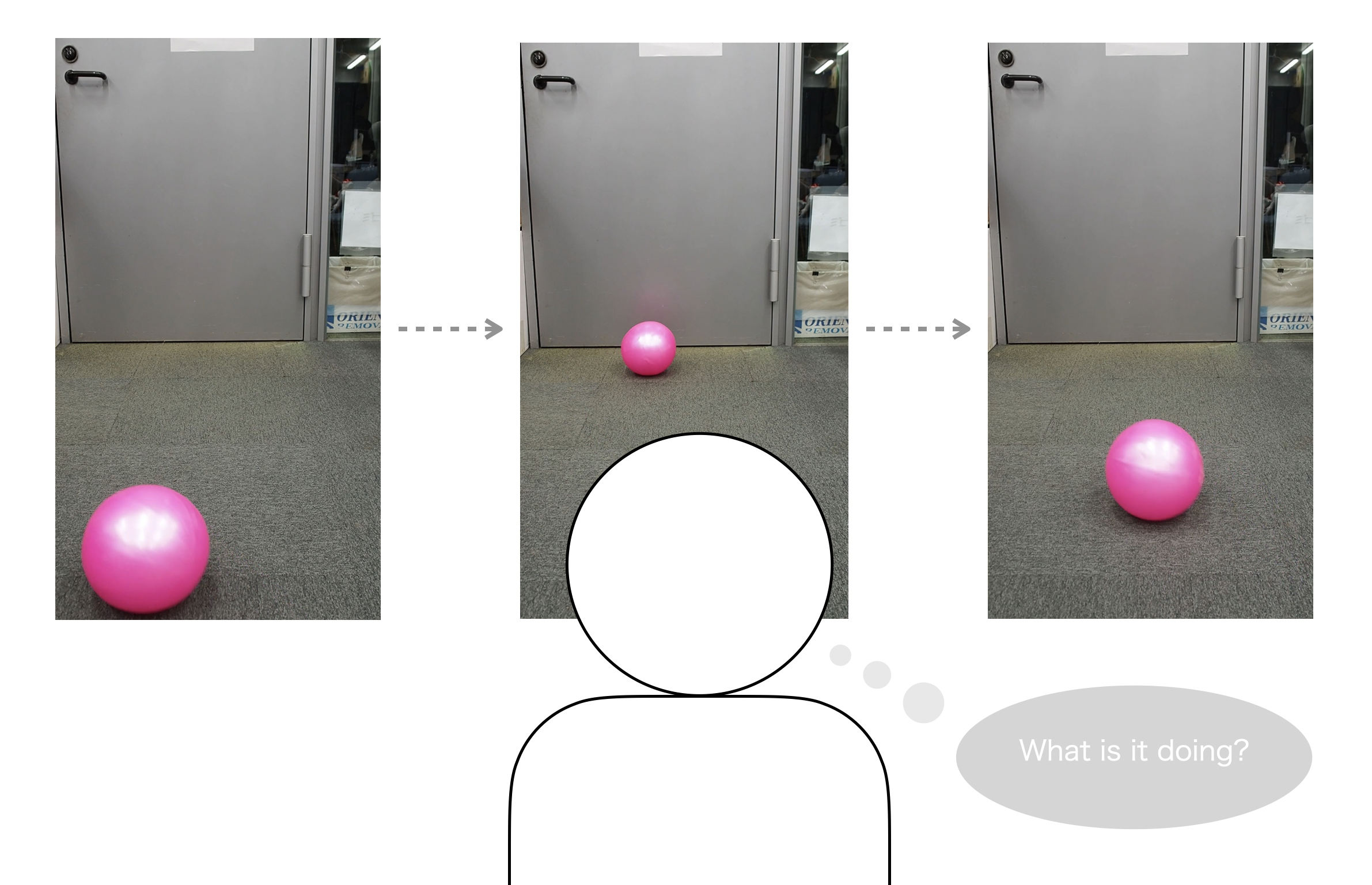
Generally, when we make a large number of people to take a certain action, we give them instructions in the form of text or voice announcement. On the other hand, when animals such as dogs and cats want to make people to move in a certain way, they use behavior and cries to express their intentions. And Humans don’t expect animals to be perfectly from the begining, but they try to read animals’ intentions from their behavior. As a result, animals can make people indirectly imagine their intentions from behavior. This communicate method is not efficient, but it is less dependent on language because it induces spontaneous behavior with using human imagination. In this research, as a method of inducing behavior of people, I make “objects” to behave as if they have a will like an animals. By using this, I search about this methods: regardless of the language and the age of each person, people imagine the intentions of objects and act spontaneously without feeling uncomfortable.
Vision
Through the actions of objects, it become possible to induce people’s actions. It’s different with general instructions, when people use their imagination to read the intentions of objects, they are less to feel uncomfortable about being told what to do. For example, it is expected to be effective as a guidance method in airports. Due to the spread of the COVID19, it have been taken to prevent contact between travelers from high-risk countries and other users in the airports, but there is still no clear separation. Therefore, by using nonverbal and natural behavioral inducements, it become possible to limit the range without causing discomfort to the user, while ensuring safety.
Project Research
In this research, as a method of indirectly inducing people’s action, we make a ball, which people are used to seeing everyday, act as if it has a will based on the behavior of “dog” and “cat”. Then I verification whether people can imagine the intentions of objects regardless of the language they use, and whether they can act spontaneously without feeling uncomfortable.
Publication
none
Softness for Robot

Outline
Most robots today are used in factories.Robots built with conventional approaches consist of a hard and sturdy exterior and skeleton, and are equipped with powerful actuators.On the other hand, there is an increasing need for robots to fit into our daily lives, and robots built using conventional approaches can cause fear and sometimes even become deadly weapons.To address this issue, soft robots have been proposed to give robots the “softness” of living things.In this project, we propose a prototyping tool for soft robots and an approach to add softness and tactile organs to existing robots.
Vision
In a society where humans and robots coexist in harmony, it is desirable that robots are designed and implemented in such a way that people can easily approach them.It is known that softness gives people a sense of security and closeness, but its practical application has just started in the field of therapy and care.In this project, we aim to realize a system that gives softness to robots in a wide range of fields involving human-robot interaction (HRI).
Project Research
ModuRo:
Most of the soft robots that have been proposed in the past require molding, external devices such as pumps and compressors, and are basically controlled by code-based programs, making prototyping a difficult task.Therefore, we propose “ModuRo,” a prototyping tool using modules equipped with soft actuators.By combining ModuRo, we create an environment in which anyone can easily prototype soft robots from objects around them, such as stuffed toys.
Most of the soft robots that have been proposed in the past require molding, external devices such as pumps and compressors, and are basically controlled by code-based programs, making prototyping a difficult task.Therefore, we propose “ModuRo,” a prototyping tool using modules equipped with soft actuators.By combining ModuRo, we create an environment in which anyone can easily prototype soft robots from objects around them, such as stuffed toys.
STI:
In order to provide skin sensation to a robot, a number of sensor units are often used to wrap the robot’s exterior.However, the flexibility, shape and material of these units is a challenge for soft robot implementation.In this project, we develop and validate a system called “STI” that can detect changes in the shape of the material as well as add softness to the exterior of the robot.
Publication
none
Sociable Things × Augmented Reality
Outline
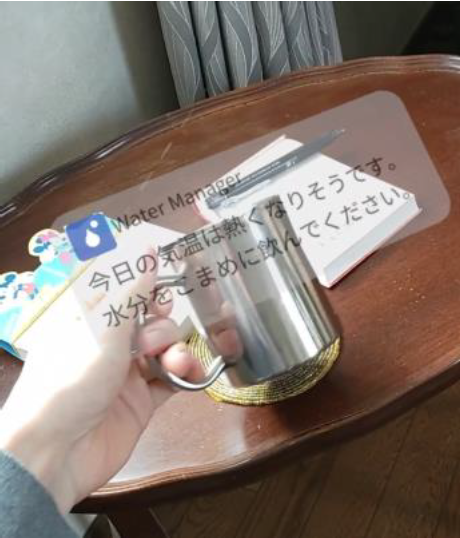
Sociable Things is referred to the next-generation IoT environment realized by applying the technology used in the field of personal robots to fine-grained objects including daily necessities. A community of things that grasps various contexts is a stepping stone to encourage people to change their behavior and improve the quality of their living environment. We developed a “work-life balance keyboard” that detects fatigue and physically interferes with the user. Furthermore, in the most advanced project, we are exploring the next-generation IoT spaces focused on the wide range of things by using virtual objects on Augmented Reality (AR).
Vision
The current smart systems have greatly improved the convenience of our lives. It is possible to operate various registered devices from one mobile device, and multiple devices cooperate to establish one system. In recent years, the number of devices such as smart speakers that focus on conversation with users has increased. The purpose of this project is implementing a system that emphasizes not only such convenience but also the interaction between people and things. We aim at realizing the society that various things cooperate to support human behavior from psychological aspects on a daily basis.
Project Research
Interactive IoT Spaces with Augmented Existence
The latest IoT environments focus on sensing parts. On the other hand, the information providing function is premised on using a device with abundant computational resources such as a smartphone. The configuration of notifications is often static because it is deeply linked to the information providing service. In this research, we defined and proposed a new word “augmented existence” as a concept that combines AR and IoT. By increasing the presence and value of things by using both technologies, we will realize an interactive IoT space for all things that users can see, including existing conversational IoT devices.
Publication
Kentaro Taninaka, Kazunori Takashio, Virtual IoT: An IoT Platform with MR Technologies Realizing Low-cost and Flexible Notification of Life-support Information, IEEE The 2019 International Conference on Internet of Things and Intelligence Systems (IoTaIS2019), 2019/11/3-5, Bali, Indonesia.
https://ieeexplore.ieee.org/document/8980382
https://ieeexplore.ieee.org/document/8980382
谷中健大朗, 高汐一紀 , “v-IoT: AR による仮想的 IoT 環境の構築と連想概念による適切な情報提示オブジェクト選択手法” 電子情報通信学会論文誌 D 104.1 (2021): 21-29
https://search.ieice.org/bin/summary.php?id=j104-d_1_21

Telepresence Robot

Outline
Face-to-face communication is still important despite the proliferation of telecommunication tools such as telephone and e-mail, and in 2020, the impact of the new coronavirus infection has led to a rapid increase in the use of video calling applications around the world. However, there are many situations where we feel the limitations of such applications. Telepresence, a technology that reproduces the presence of a person in a remote location, is attracting attention. Telepresence was originally a technology for remote control by an operator in a dangerous place. However, since it has been extended to the context of communication, both the sense of presence felt by remote users and the sense of presence felt by local users toward remote users have become important. In this project, we will study an approach to improve the sense of presence in telepresence robots equipped with telepresence technology.
Vision
As telecommunication systems become more widespread, we will be able to live our lives free from physical constraints, without spending time on the act of moving. In fact, during the epidemic of the new coronavirus infection, the “work-cation” style, in which people work while traveling, was actively used. Some companies have also decided to reduce the size of their headquarters in the capital. In Japan, many companies and other social activities are concentrated in urban areas. Inevitably, people living in these three metropolitan areas account for 51.8% of Japan’s population, making the concentration of population in urban areas a challenge. However, as online telecommunication advances, the difference between rural and urban areas becomes less of an issue. It may even solve problems such as the disparity between urban and rural areas and the concentration of medical services in urban areas.
Project Research
Nonverbal behavior and physical communication are also essential for communication. However, most of the existing telepresence robots show only the face on the display. However, most of the existing telepresence robots show only the face on the display, so it is possible to extend the modality of communication by extending the display range of the remote user. In this project, we will implement a prototype and investigate the relationship between the display area of the remote user and the sense of presence.
If a telepresence system with enhanced physicality is implemented with a two-dimensional display, the presence of the remote user’s background may interfere with the sense of presence. Therefore, in this project, we investigate the relationship between the remote background and the sense of presence, and implement an approach to solve this problem.
Publication
[1] Y. Furuya and K. Takashio, “Telepresence Robot Blended With a Real Landscape and Its Impact on User Experiences,” in 2020 29th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), 2020, pp. 406–411, doi: 10.1109/ro-man47096.2020.9223346.
[2] 古谷優樹, 高汐一紀, “遠隔者の身体的存在感を高めるテレプレゼンスロボットの提案,” in 信学技報, vol. 119, no. 446, CNR2019-54, 2020, pp. 53–57.
[3] 古谷優樹 and 高汐一紀, “テレプレゼンスロボットにおける遠隔ユーザの身体性を考慮した表示手法の検討,” in 信学技報, vol. 121, no. 93, CNR2021-3, 2021, pp. 8–13.