Sorry, this entry is only available in 日本語.
(日本語) 痛みに関する自己開示を促す対話ロボットの検討,島田愛里・宇治川遥祐・高汐一紀(慶大),電子情報通信学会技術研究報告,vol. 123, no. 394,pp. 41 – 46,2024年2月
(日本語) パーソナルテンポに同調する発話システムの実装と評価,宇治川遥祐・高汐一紀(慶大),電子情報通信学会技術研究報告,vol. 123, no. 347CNR2023-30,pp. 25 – 30,2023年1月
A Preliminary Study for the Ethereum Blockchain-Based Smart Home Systems,C. Yiyang ・K. Takashio (Keio Univ.), 2022 13th International Conference on Information and Communication Technology Convergence (ICTC),2022, pp. 71-76
The application of blockchain technology means that smart home devices will be greatly improved in terms of versatility and security, allowing people to use them more safely and conveniently in their daily home life. For smart home practitioners, blockchain technology means the arrival of the next “window”, indicating that the industry will develop from the budding stage to the popular stage. This paper proposes a smart home system based on the Ethereum blockchain as a platform. Through the use of smart contract technology, it not only builds a closed-loop management platform from energy suppliers to end users but also realizes cross-ecological communication. At the same time, this paper also examined the latency problem of “solidity” in the multi-contract call environment. By comparing the local pace test and the blockchain-side pace test, we found that the function invoked pace inconsistent between local-side and chain-side existed but the delay can be controlled within one second.
Design and Implementation of a Dialogue Breakdown Avoidance Method Using Excuses in a Chat Dialogue System
対話システムとの自然な対話を実現するには,対話破綻を解消する必要がある.しかし,対話破綻を検出する研究は多く行われており,手法も確立されている一方で,対話破綻検出を行った後,どのように対話破綻を回避するのかという対話破綻回避をテーマとして扱った研究は,相対的に見て数が少なく,明確な手法も確立されていない.そこで,本研究ではこの対話破綻を,システムが言い訳を返すことで回避する手法を提案する.言い訳は主に自分の失敗・過失に対する弁明・謝罪と定義されている.これを対話システムに置き換えると,対話破綻をシステム視点での失敗・過失として解釈できる.以上の経緯から,ユーザーに好印象を与える言い訳応答を返すことで対話破綻回避を行うモジュールを作成し,対話システムへの実装を行った.また,システムの実運用を想定とした主観視点の印象評価実験と,対話内容の定性的な評価を行う客観視点の印象評価実験の2種類の実験を実施し,提案手法の有効性を示した.
(日本語) ロボティクスと XR による New Experience ,高汐 一紀,NATURE INTERFACE Aug. 2023 no.88 pp.16-19
Analysis of the Effect of Modality and Social Relationships on Building Common Ground , Yuki Furuya, Koki Saito,Kosuke Ogura ( Keio Univ.),Koh Mitsuda,Ryuichiro Higashinaka (NTT),Kazunori Takashio ( Keio Univ.)
Building common ground with users is essential for dialogue agent systems and robots to interact naturally with people. While a few previous studies have investigated the process of building common ground in human-human dialogue, most of them have been conducted on the basis of text chat. In this study, we constructed a dialogue corpus to investigate the process of building common ground with a particular focus on the modality of dialogue and the social relationship between the participants in the process of building common ground, which are important but have not been investigated in the previous work. The results of our analysis suggest that adding the modality or developing the relationship between workers speeds up the building of common ground. Specifically, regarding the modality, the presence of video rather than only audio may unconsciously facilitate work, and as for the relationship, it is easier to convey information about emotions and turn-taking among friends than in first meetings. These findings and the corpus should prove useful for developing a system to support remote communication.
Dialogue Corpus Construction Considering Modality and Social Relationships in Building Common Ground. Yuki Furuya, Koki Saito, Kosuke Ogura, Koh Mitsuda, Ryuichiro Higashinaka, and Kazunori Takashio. 2022.In Proceedings of the Thirteenth Language Resources and Evaluation Conference, pages 4088–4095, Marseille, France. European Language Resources Association.
Building common ground with users is essential for dialogue agent systems and robots to interact naturally with people. While a few previous studies have investigated the process of building common ground in human-human dialogue, most of them have been conducted on the basis of text chat. In this study, we constructed a dialogue corpus to investigate the process of building common ground with a particular focus on the modality of dialogue and the social relationship between the participants in the process of building common ground, which are important but have not been investigated in the previous work. The results of our analysis suggest that adding the modality or developing the relationship between workers speeds up the building of common ground. Specifically, regarding the modality, the presence of video rather than only audio may unconsciously facilitate work, and as for the relationship, it is easier to convey information about emotions and turn-taking among friends than in first meetings. These findings and the corpus should prove useful for developing a system to support remote communication.
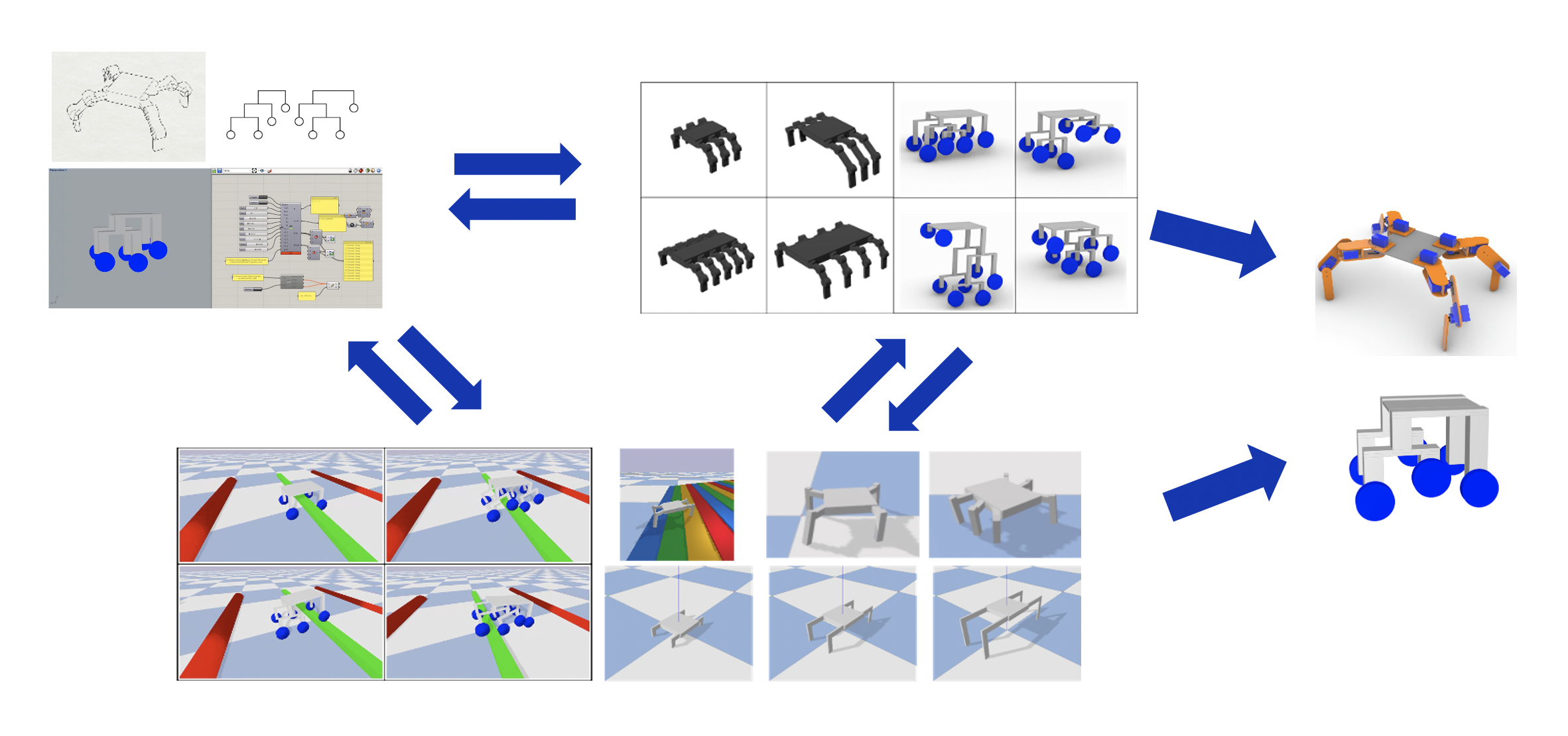
Novel Robotics Design
Outline
Robots are used in a wide variety of fields to satisfy different requirements and problems. There are various designs, actuators, and mechanisms of robots, and it is difficult to design the most suitable design and mechanism to match the required requirements. Therefore, in this study, the purpose is to obtain the optimal design and structure required by applying the algorithmic design method to the design and mechanism of robots. Also, this research will pursue the design suitable for human-robot interaction toward the realization of a society in which humans and robots can collaborate.
Vision
Recent improvements in computing capacity have made it possible to move robots on simulations and to learn their behavior using reinforcement learning. By using such calculations on simulations, it will be possible to design complex robots more easily and to obtain the optimal design for each robot, which cannot be achieved by just designing by humans. Also, like the 3D printers of today, it is expected that a society where individuals can design and build robots to deal with familiar problems easily, even for beginners.
Project Research
Development of Algorithmic Robot Design Method
Robots have a wide variety of forms and functions. It is strenuous to design a comprehensive robot that could satisfy general requirements. In this study, I proposed and developed the “Algorithmic Robot Design Method,” which applies the algorithmic design method to the model and mechanism of robots. The methodology aims to obtain the optimal design and structure required for each robot under various conditions, considering the motion and behavior of the robot and actuators, and the evaluation by the user.
Publication
MITOU program 2020
https://www.ipa.go.jp/jinzai/mitou/2020/gaiyou_tn-3.html
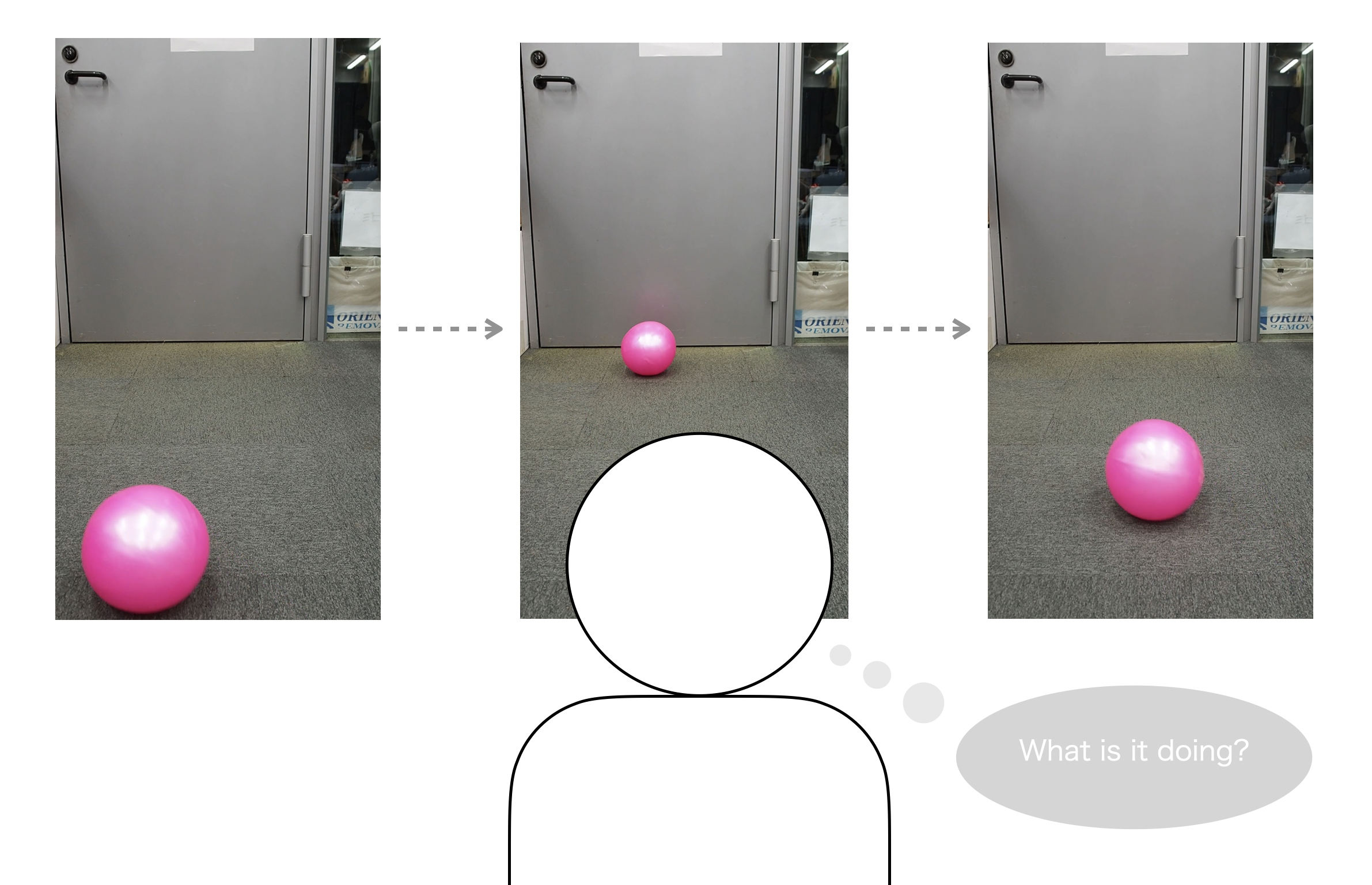
Motivating for Human Behavior
Outline
Generally, when we make a large number of people to take a certain action, we give them instructions in the form of text or voice announcement. On the other hand, when animals such as dogs and cats want to make people to move in a certain way, they use behavior and cries to express their intentions. And Humans don’t expect animals to be perfectly from the begining, but they try to read animals’ intentions from their behavior. As a result, animals can make people indirectly imagine their intentions from behavior. This communicate method is not efficient, but it is less dependent on language because it induces spontaneous behavior with using human imagination. In this research, as a method of inducing behavior of people, I make “objects” to behave as if they have a will like an animals. By using this, I search about this methods: regardless of the language and the age of each person, people imagine the intentions of objects and act spontaneously without feeling uncomfortable.
Vision
Through the actions of objects, it become possible to induce people’s actions. It’s different with general instructions, when people use their imagination to read the intentions of objects, they are less to feel uncomfortable about being told what to do. For example, it is expected to be effective as a guidance method in airports. Due to the spread of the COVID19, it have been taken to prevent contact between travelers from high-risk countries and other users in the airports, but there is still no clear separation. Therefore, by using nonverbal and natural behavioral inducements, it become possible to limit the range without causing discomfort to the user, while ensuring safety.
Project Research
In this research, as a method of indirectly inducing people’s action, we make a ball, which people are used to seeing everyday, act as if it has a will based on the behavior of “dog” and “cat”. Then I verification whether people can imagine the intentions of objects regardless of the language they use, and whether they can act spontaneously without feeling uncomfortable.
Publication
none