It is expected to utilize service robots working in cooperation with humans. In recent years, the number of service robots developed is increasing in Japan. When classifying service robots developed in 2017, genres such as ”hobby” and ”watching and communication” are up to the top. Along with the growing expectation for such service robots, it is expected that the place of robot motion creation will increase. Actual creation of the current motion includes the method of placing key frames on the timeline and motor control by ROS, but these motion creation is a skillful and novice person and it is different in terms of the nature of motion and power it tends to be opened.
MoDe: Analysis of Human Motion for Humanoid Robot Using “Kinovea” : suzume
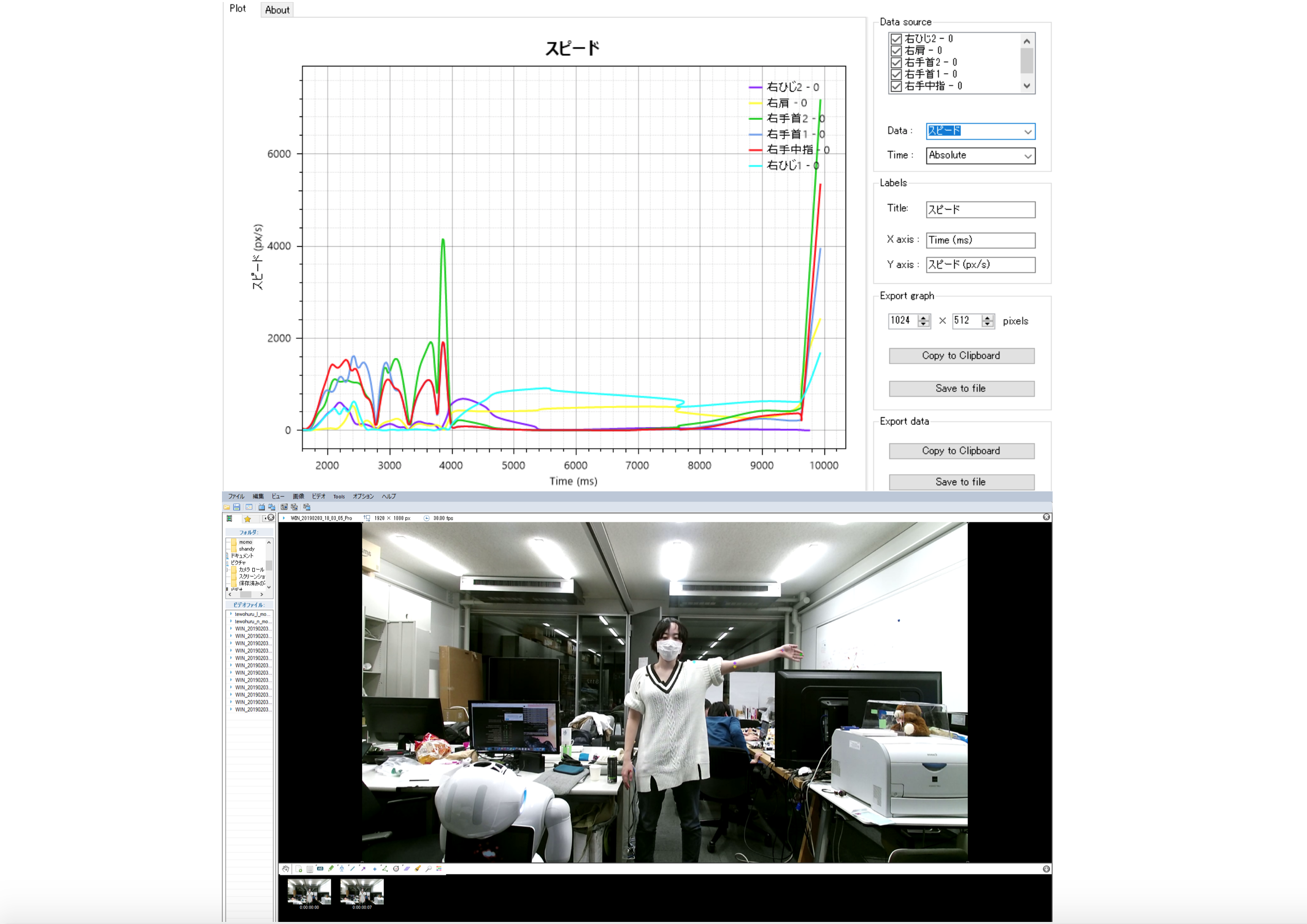
I gathered data that three patterns of four motions, “shake hands”, “give things”, “greetings” and “why” were done by three patterns. We also analyzed and analyzed motion data using motion analysis software “Kinovea”. Then, we examined the tendency of motions from analysis results. Regarding the motion that waving the hand, the preliminary action until raising the hand was not emphasized much in any case, and it was emphasized in either side after starting swinging.
Integrating Manga-Effects to Telepresence Video Communication : rex

This research aims to test the new process of enhancing the quality of telecommunication. Focusing on the presentation of the video call from laptops and from telepresence robot, we test whether utilizing Manga-Effects, emotion-emphasizing Manga-like video filters, proves effective to bring out one’s social presence.
While many related research have approaches incorporating the video processing of the users’ background, we approach this topic by taking the users’ facial expressions.
Synthesized Speech Using Vocoder Technology in Python : easy

Existing voice changers change the nature of voice by adjusting pitch and format. Therefore, it depends on the voice of the user, so it is difficult to deliver with the ideal voice.
I learned about speech synthesis technology with the goal that users can make broadcast with the voice they want to become.
Personality Development of Robots Through Long-Term Interaction with Users : kiyomo

This research aims at developing a system that emulates a smooth and gradual personality development
of communication robots through robot-to-user interaction. The system developed in this paper will be a
successor model of a previously created model based off human child personality development model, called C2AT2HUB. The successor model will emulate a smoother personality development, while making it transparent for the user and will be experimented and evaluated on a longer period of time using the Vector Resolution Method.
Voice Expression in Human-Robot Communication by Virtual Emotion : drowsy
In a robot and human conversation, the robot’s flat voice is a one of the factor that boring conversation. Automatically adjust emotional expressions to speech from virtual emotion in a robot. In this study, I verify that communication will be smooth when it considers the flow of emotional change from the conversation history.
Transparent Backgrounds on Video Chats – To Improve experiences of telecommunication

Improving technology of remote communication, human will be free from “transfer”. This term, I mainly researched and made a conclusion about the problems of current telepresence systems. Based on that, I found existing opposite background decreasing the experiences of video chats. Therefore, I will continue research about extracting and replacing background on video chats by using tablet’s camera
“Collecting things ‘like’ a robot” project : momo&Rico

We collect robot-like “shapes” and “movements” in daily life with photos, videos, sometimes sketches.
Then we categorize and analyze those data from many viewpoints, and consider what “robot-like objects” is.
On the contrary, by doing so, it helps to understand what humans or living things- “like” object is.
Ex-Amp Robot System :: tisbee
Currently, a variety of different robots serve to aid and enhance human beings’ daily lives. In this research, I have focused on creating a robot system that would function as an intermediate in human to human communication.
This personal robot system detects the users facial expression through an outside camera, then performs gestures according to the detected emotion. By using this personal robot, a person who is unable to freely move their own body would be able to add a component to their method of communication, as the robot will act as the users’ body in the communication. I have conducted experiments to validate that an Expression Amplifying Robot indeed helps enhance communication between a User, who is unable to move below the neck, and another person.
Implementation of Aquatic Swarm Robots to Aid the Declining Japanese Fishing Industry : kiyomo

This research proposes a solution to the declining labor force of Japanese fishing industry through the implementation of aquatic swarm robots, or swarm Unmanned Surface Vehicle (USV). As a target, we primarily focus on the makiami style fishing, where with the implementation of this system, the amount of workers required can be significantly reduced. As a preliminary step, a prototype of swarm USV that can adjust its position as a swarm on the surface of water will be made.