Robots are used in a wide variety of fields to satisfy different requirements and problems. There are various designs, actuators, and mechanisms of robots, and it is difficult to design the most suitable design and mechanism to match the required requirements. Therefore, in this study, the purpose is to obtain the optimal design and structure required by applying the algorithmic design method to the design and mechanism of robots. Also, this research will pursue the design suitable for human-robot interaction toward the realization of a society in which humans and robots can collaborate.
Recent improvements in computing capacity have made it possible to move robots on simulations and to learn their behavior using reinforcement learning. By using such calculations on simulations, it will be possible to design complex robots more easily and to obtain the optimal design for each robot, which cannot be achieved by just designing by humans. Also, like the 3D printers of today, it is expected that a society where individuals can design and build robots to deal with familiar problems easily, even for beginners.
Development of Algorithmic Robot Design Method
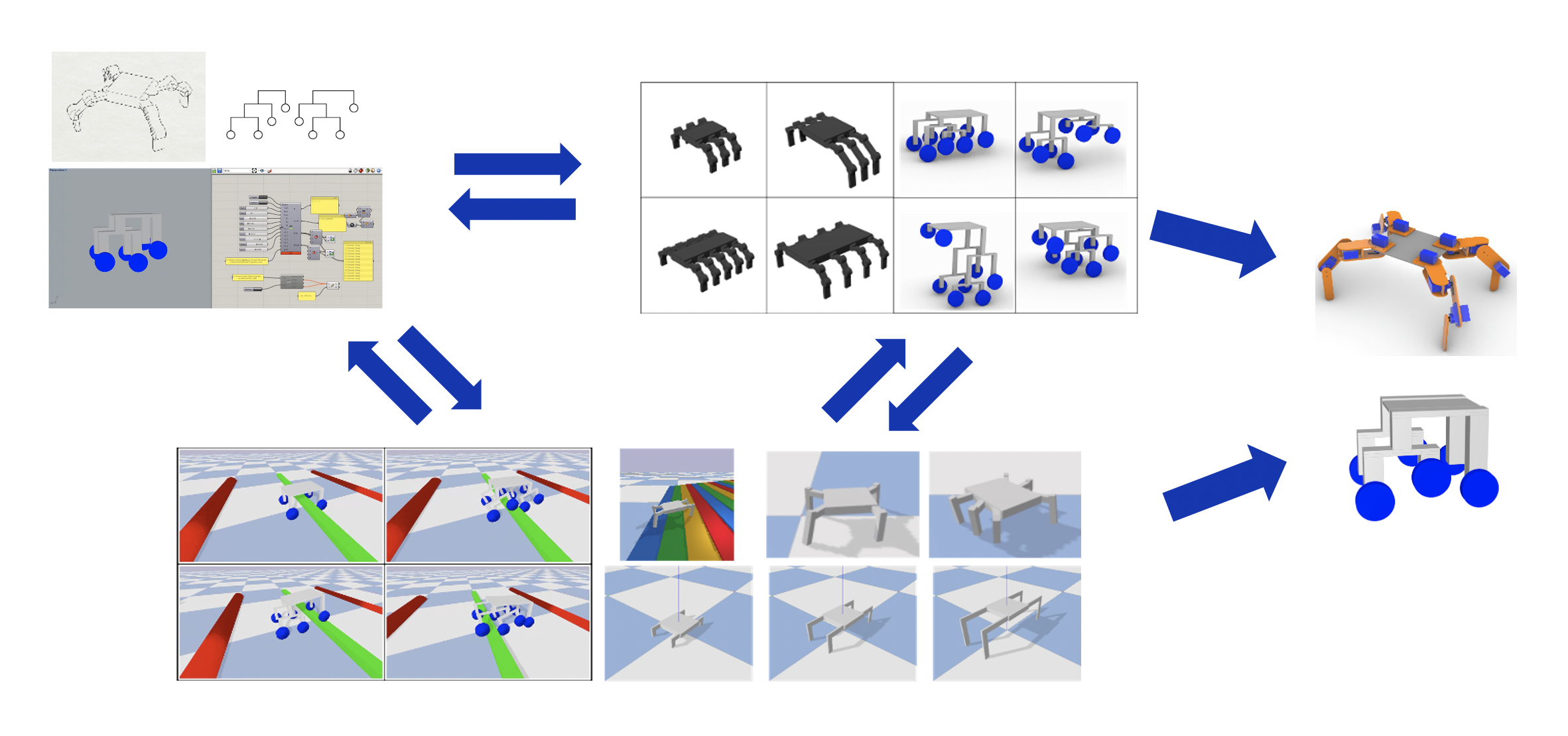
Robots have a wide variety of forms and functions. It is strenuous to design a comprehensive robot that could satisfy general requirements. In this study, I proposed and developed the “Algorithmic Robot Design Method,” which applies the algorithmic design method to the model and mechanism of robots. The methodology aims to obtain the optimal design and structure required for each robot under various conditions, considering the motion and behavior of the robot and actuators, and the evaluation by the user.
MITOU program 2020
https://www.ipa.go.jp/jinzai/mitou/2020/gaiyou_tn-3.html