Who Are You Talking to?
課題内容
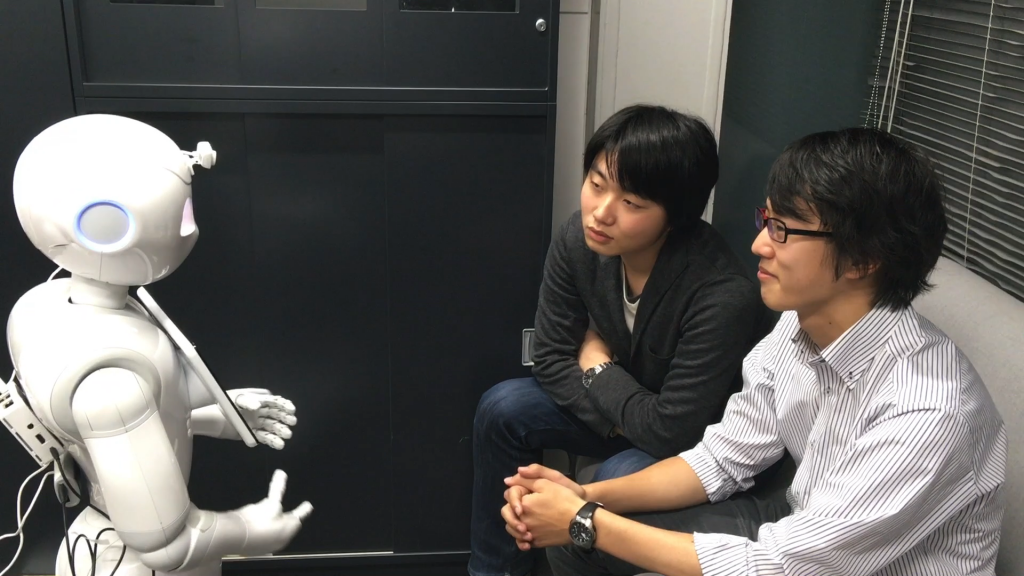
二人のユーザとPepperが会話をしている想定で,Pepperにインタラクションの状況を理解する様々な機能を追加する.
- 悲しい表情をしている人の方を向く機能
- 人が話していることを検知する機能
- 誰が話しているのかを推定する機能
- 人がPepperともう一人のユーザのどちらを見ているのかを推定する機能
- 「誰が誰に向かって話しかけているのか」を推定する機能 (extra課題)
…人が話している間,最も話者が向いていた方向の人(ロボット)が話しかけられている対象とみなす
実装環境
- Softbank Robotics 社 Pepper
- Choregraphe (GUIを使ってPepperのプログミング開発ができる)
- Python 2 (Choregrapheのプログラムをカスタマイズするのに使用)
目的
- 画像情報や音声情報からコミュニケーションに関する情報を取得する体験をする
背景
- ロボットが人とN対Nの対話をするには,人が誰に向けて話しているのかをロボットが認識する必要がある
- 既存研究では,視線(または視線の近似値として頭部の向き)や発話の韻律情報(ロボットに対してはゆっくり喋るなど),体の揺れ,発話内容などをもとに,人が誰に対して発話を行なっているかの推定が行われている.
- 新人課題では,もっとも古典的な手法として,発話中の視線情報をもとに受話者を推定するプログラムをNaoqi上に構築してもらう.