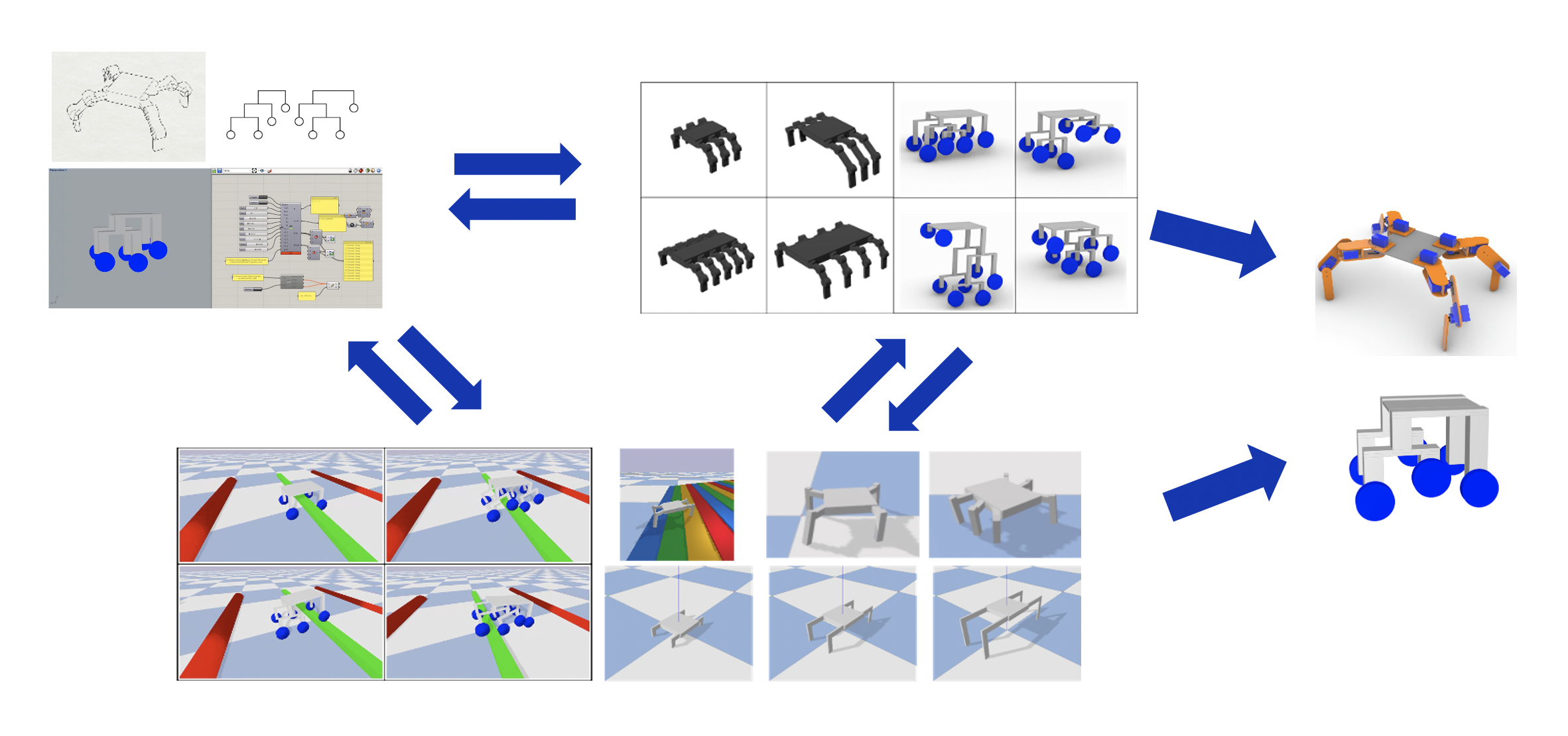
ロボットは幅広い分野でそれぞれの要求や課題に合ったロボットが活用されている.それらのロボットを設計・開発していくためには,求められる仕様に沿って,形状や機構のデザインを行っていくが,様々なデザインやアクチュエータ,機構が存在するロボットに対して,求められる要求に最も適したデザインや機構を設計していくことは難しい.そこで本研究では,ロボットのデザインや機構に,アルゴリズミック・デザイン手法を応用することで,求められる最適なデザインや構造を得ることを目的とするとともに,人とロボットの協奏社会の実現に向け,人とのインタラクションに適したデザインも追求していく.
近年のコンピューティング能力の向上によって,シミュレーション上でロボットを動かすことや,強化学習を用いて動作を学習させることなどが可能となっている.そのようなシミュレーション上での計算を踏まえることで,複雑なロボット設計がより容易になるとともに,人間が行う設計だけでは得られない,それぞれのロボットに求められる最適な設計やデザインを得ることが可能になると期待する.また,現在の3Dプリンターのように,個人が身近な問題に対して,初心者でも簡単にロボットを設計・製作して対処することが出来る社会を期待している.
アルゴリズミック・ロボットデザインの手法の開発
ロボットの形態や機能は多岐にわたり,それぞれのロボットに対して,求められる要求に最も適したデザインや機構を設計していくことは難しい.そこで本研究では,ロボットのデザインや機構に,アルゴリズミック・デザイン手法を応用し,ロボットやアクチュエータの動きや動作,ユーザによる評価を考慮しながら様々な制約下でそれぞれのロボットに求められる最適なデザインや構造を得ることを目的とした,「アルゴリズミック・ロボットデザイン手法」の提案と開発を行っている.
2020年度未踏IT人材発掘・育成事業
https://www.ipa.go.jp/jinzai/mitou/2020/gaiyou_tn-3.html