コミュニケーションロボットは人間との長期的な関係性を築く必要がある.そのためには,一時的に利用 される雑談応答サービスで重視される単文での面白さよりも,会話としての自然さを高めなければならない.本研究 では,相手の発話に呼応した対比的応答を行うロボットシステムの実装を行なった.サブカル雑談において対比的応 答は,盛り上がりに必要な共感の呈示や話題転換など会話の進行上の重要な役割を果たしている.単文での面白さを 重視した応答を行うロボットと本ロボットがユーザに与える印象を比較し,発話生成ポリシーが人間とロボット間の 関係構築に与える影響について議論する.
親近感を生み出す協働ロボット間インタラクションの身体性デザイン : 柏木梨佐(聖心女子学院), 宮本凜太郎, 高汐一紀, 信学技報, vol. 118, no. 94, CNR2018-6, pp. 29-32, 2018年6月.
次世代のロボットサービスでは,複数のロボットが連携動作を用いて人と協働,共生することが前提となる ため,如何にユーザーの親近感を得るかが重要な意味を持つ.ロボットは外装だけでなく,その挙動もまたユーザー に不安感をあたえないようにデザインされなければならない.本研究ではロボット間の連携動作に,敢えて身体性を 持ったロボット間インタラクション要素を加える手法を提案する.既存のロボットを用いた連携動作と,本システム を用いた場合を比較し,協働,共生するロボットに対するユーザーの印象変化を評価する.
ドラえもんを創る-気まずい空間を察知し緩和するロボット- : moe

コミュニケーションを行う際に、人と人の間(あいだ)に流れる気まずい間(ま)を改善し、人と人の間にたって、 発話や行動でその空間をより良い物へ改善する。漫画ドラえもんに見られるような人の発話や行動を理解し気まずさを改善するロボットを製作する。
AED到着時間短縮のためのプロダクト開発 : easy
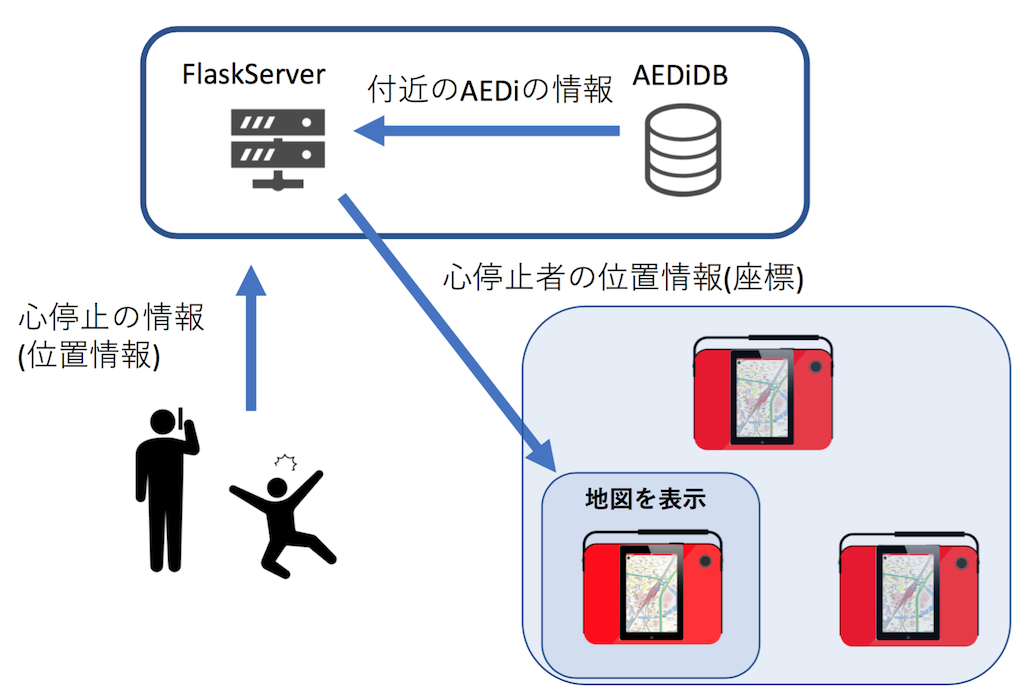
心停止が起きた現場で、心停止者に対し迅速にCSRやAEDを用いて心臓にショックを与えることで生存率が向上する。より早く、AEDを現場に届けるためには、AEDを取りに行くのではなく、AED付近の人が現場へ運搬する方が効率的であると考えた。本研究では、通行人に対してAEDを手に取ってもらいその後正確に心停止の現場まで誘導する手法を提案する
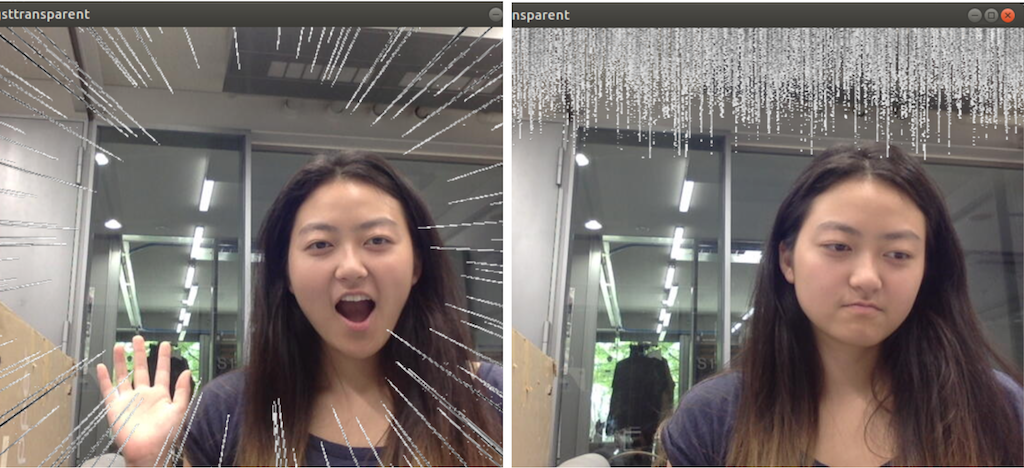
仮想的 IoT 技術を用いた生活支援情報提示手法 ~IoT機器と日用品からの情報提示による情報理解度の比較~ : shandy

IoT機器の普及に伴い、ユーザに対し能動的に生活支援情報を提示する機能を持つ機器も増えた。しかし、日用品等、よりユーザの生活に近い物品に情報提示機能を付与することは難しく、スマートスピーカの様に豊富な計算資源をもつ機器から多種多様な情報が提供されているのが実情である。そこで本研究では、AR技術を応用することで、このようなIoT機器化困難なモノを仮想的にIoT機器化する手法を提案する.本手法は,提示する情報のメタ情報をモノが持つアフォーダンス情報や機能にマッチングすることで、適切なモノが適切な場所,適切なタイミングで、役割に合った情報をユーザに伝達することを可能にする。本稿では、AR上で日用品から情報提示する手法と、スマートスピーカ等、既存のIoT機器の情報提示手法と比較し、提案手法の有用性を明らかにする。
小動物型換気促進ロボットの提案 : karen
小動物型の換気促進ロボットを提案する。ロボットは内蔵センサによって室内空気汚染度を測定し、モーションによってユーザーに換気を促す。汚染度が上昇するにつれてロボットは苦しんでいるようなモーションを行い、ユーザーに窓を開けて環境を改善するよう要請する。ユーザーに「ロボットを助ける」という動機付けを行うことで換気を促す。
2.5D telepresence robot : rex
Today, telepresence robots are regularly being used within the environment around us. “Telepresence” has become one of the convenient tool for businessmen who often need to attend meetings across the sea. Although the use of these robots are generally known for business-related instances, people of different fields now fully extend the use of the robots. Yet, telepresence robots still have a small boundary in what it can do. This paper will discuss how animation video effects can resolve the drawbacks of today’s telepresence robots.
会話の文脈と割り込み状況を考慮した会話タスクスケジューリング手法CACTSの実装と評価 : 堀江拓実, 高汐一紀, 信学技報, vol. 117, no. 443, CNR2017-30, pp. 45-50, 2018年2月.
公共空間で動作するコミュニケーションロボットでは,動的な会話タスクの生成と,会話相手に違和感や 不快感を与えない会話タスクの切り替えが必要となる.本論文では,ロボットが会話外から割り込まれた場合の会話 タスクのスケジューリング手法として,ロボットが割り込みを受けると,内容に合わせた会話タスクを生成し,会話 の重要度,長さ,会話相手同士の人間関係,会話相手の情動,および現在の会話タスクの隣接ペアの情報に基づいて 会話タスクのスケジューリングを行う CACTS を提案し.偶然ロボットを見ている周囲の人間の立場と,割り込まれ る立場から,常に最新の会話タスクを優先する場合と比較した本手法の印象を評価した.実験の結果,提案手法の有 効性が示された一方,割り込まれた状況に対して一意にスケジューリングを判断することの限界も示された.