人間と協調して働くサービスロボットの活用が期待されており,近年国内でのサービスロボットの開発数が増えている.2017年に開発されたサービスロボットをジャンル別に分けていくと,“ホビー”や“見守り・コミュニケーション”といったジャンルが上位に上がっている.こうしたサービスロボットへの期待の高まりに伴い,ロボットのモーション作成の場が増えていくと予想される.現状のモーション作成の実態として,タイムライン上にキーフレームを置いていく手法や ROSによるモーター制御などが挙げられるが,これらのモーション作成は熟練者と初心者でモーションの自然さや,迫力といった点で差が開いてしまいがちである.そこで本研究では,アニメーションで使われる誇張表現をユーザが作成したモーションに自動的に付与する ことで,モーション作成の工数削減と,ロボットのモーションの自然さの向上を目的としたシステムを提案する.複数の誇張表現を取り入れることで,ロボットのモーションの自然さや滑らかさといったユーザの印象を調査,及びシステムの有用性を評価した.
MoDe: ヒューマノイド型ロボットのためのモーションデフォルメツールモーションの基準の解析 : suzume
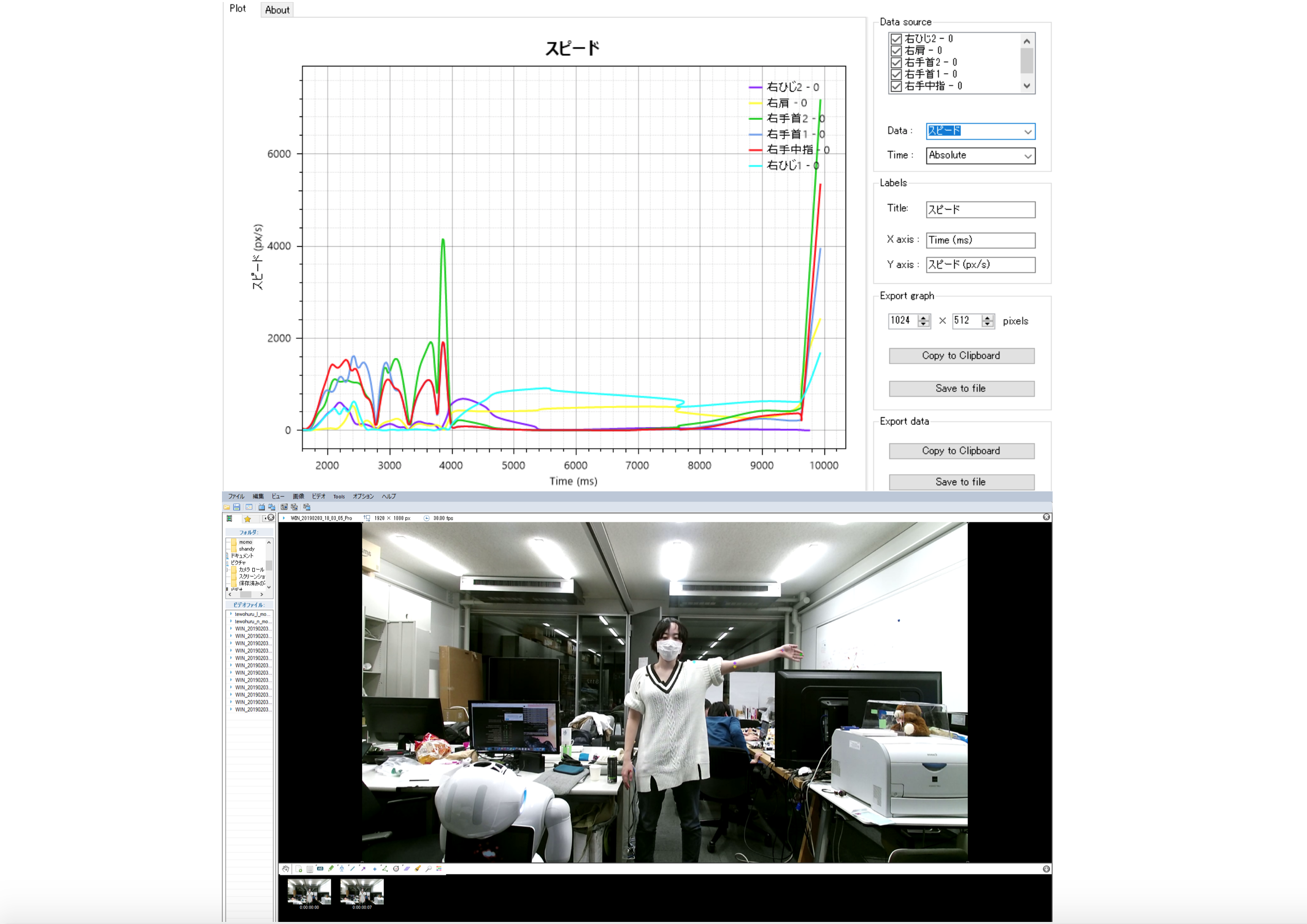
人間の「手を振る」「物を渡す」「挨拶」「なんでやねん」の4つのモーションを3パターン行ってもらったデータの収集,また, モーション解析ソフト“Kinovea”を使ったモーションデータの分析, 解析を行い, 分析結果からモーションをする上での傾向等の考察をおこなった. 手を振るモーションに関しては, 手を上げるまでの予備動作はどの場合にもあまり強調されず, 振り始めてからどちらかに強調されていた.
Integrating Manga-Effects to Telepresence Video Communication : rex

This research aims to test the new process of enhancing the quality of telecommunication. Focusing on the presentation of the video call from laptops and from telepresence robot, we test whether utilizing Manga-Effects, emotion-emphasizing Manga-like video filters, proves effective to bring out one’s social presence.
While many related research have approaches incorporating the video processing of the users’ background, we approach this topic by taking the users’ facial expressions.
Pythonでボコーダー技術を用いた音声の再合成を行った : easy

既存のボイスチェンジャーはピッチやフォーマットを調整することで声の性質を変換させている。そのため、利用者の声しに依存してまうため、理想の声で配信することが難しい。
利用者のなりたい声で、発信ができることを目標に、音声合成技術について学んだ。
Personality Development of Robots Through Long-Term Interaction with Users : kiyomo

This research aims at developing a system that emulates a smooth and gradual personality development
of communication robots through robot-to-user interaction. The system developed in this paper will be a
successor model of a previously created model based off human child personality development model, called C2AT2HUB. The successor model will emulate a smoother personality development, while making it transparent for the user and will be experimented and evaluated on a longer period of time using the Vector Resolution Method.
ロボットの会話における擬似感情の音声的表現 : drowsy
ロボットと人の会話において、会話の盛り上がりを半減させる要因の一つとして音声が単調である事があげられる。ロボットの擬似感情から音声に感情表現を自動調整し、それに合わせた発話をするよう実装する。その場合、会話履歴から感情変化の流れを考慮することでより自然な音声になり、コミュニケーションの円滑化が見られるかを検証する
空間内へ溶け込むビデオ通話 -「その場にいる」ようなテレプレゼンスロボット開発を目指して – : furuyan

遠隔コミュニケーション技術が進歩することにより,人間は「移動」に制限されることなく、自己の 存在を遠隔地において代替することができる. 現在一般に販売されているテレプレゼンスロボットに着目し,その課題の整理を行った. それを踏まえ,遠隔地のユーザーの背景が存在することから,同じ場に居る感覚が減少しているとの仮説を立てた.遠隔地において同じ場を共有している感覚をユーザーに与えるために,遠隔地の映像の背景をタブレットの背面カメラを利用して置き換えるシステムの設計を行っている.
「ロボット“っぽい”ものを収集する」プロジェクト : momo&Rico

日常の生活や街中でロボットっぽい「カタチ」や「ウゴキ」を, 画像と動画, ときにはスケッチで収集して, 色々な切り口から分類・分析する. ロボットっぽい物を考察していくことで, 逆に人間“っぽさ”, いきもの“っぽさ”の理解にも繋げる.
Ex-Amp Robot System :: tisbee
Currently, a variety of different robots serve to aid and enhance human beings’ daily lives. In this research, I have focused on creating a robot system that would function as an intermediate in human to human communication.
This personal robot system detects the users facial expression through an outside camera, then performs gestures according to the detected emotion. By using this personal robot, a person who is unable to freely move their own body would be able to add a component to their method of communication, as the robot will act as the users’ body in the communication. I have conducted experiments to validate that an Expression Amplifying Robot indeed helps enhance communication between a User, who is unable to move below the neck, and another person.
Implementation of Aquatic Swarm Robots to Aid the Declining Japanese Fishing Industry : kiyomo

This research proposes a solution to the declining labor force of Japanese fishing industry through the implementation of aquatic swarm robots, or swarm Unmanned Surface Vehicle (USV). As a target, we primarily focus on the makiami style fishing, where with the implementation of this system, the amount of workers required can be significantly reduced. As a preliminary step, a prototype of swarm USV that can adjust its position as a swarm on the surface of water will be made.