はじめに
2019年春学期,弊研究室では「新人教育プログラム」を実施します.
こちらのプログラムでは,設定された課題に取り組み,基本的なスキルを身に着けてもらうとともに,研究内容の一部を体感してもらいます.
研究室には以下の3つのグループがあります
- HARD
- MIDDLE
- Social HRI/HAI
新人の方々には,興味分野が定まっていればいずれかのグループ一つの課題,まだ決まっていなければすべてグループの課題に取り組んでもらいます.
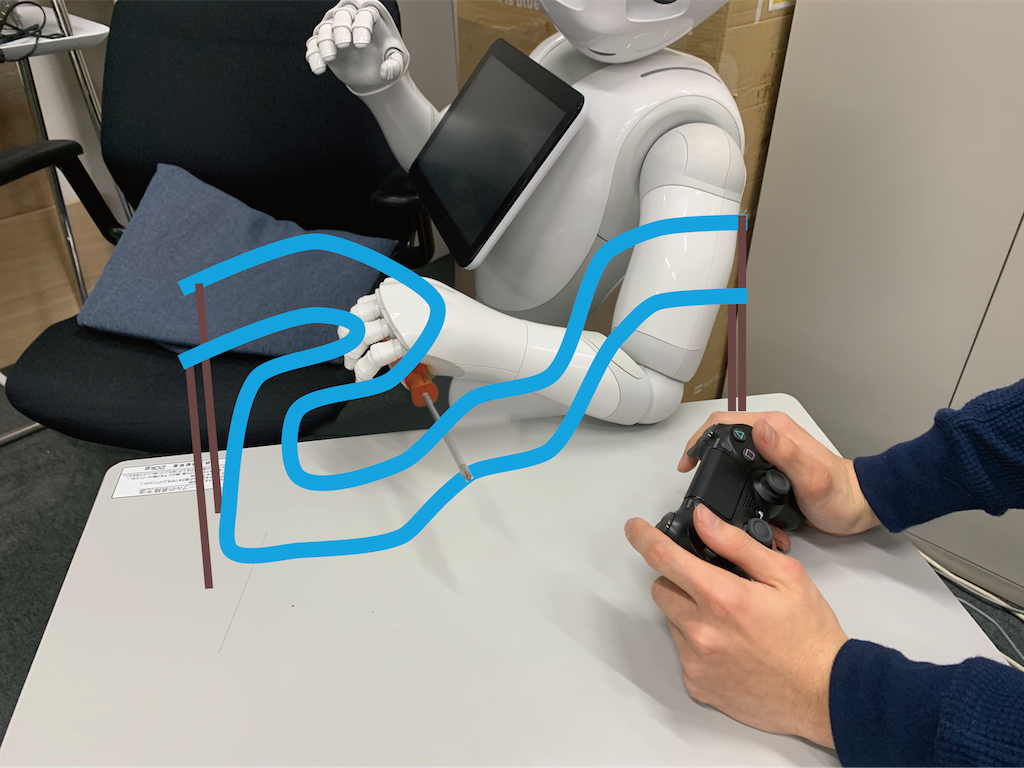
1. HARD

現在ロボットが最も普及・発達しているのは産業分野である.工場の生産ライン等での単一作業に特化させることで,ロボットは価値を提供している.一方,予てよりサービス業や家庭でのロボットの活用が期待されてきた.しかし,日本ではこれまで数々の家庭用ロボットが市販されてきたにも関わらず,初代AIBOの発売から20年となる今日においても,パーソナルロボットの活躍はメディアの中に留まっているのが現状と言えよう.
20年前とは比べ物にならないほど通信インフラやファブリケーション設備が普及した今,まず本グループでは
- 社会における諸問題は何によって解決すべきか?
- それは本当にロボットが必要なのか?/ロボット技術を応用できないか?
- パーソナルロボットが本当に必要とされる領域はどこか?
- それは技術の積み上げによるものだろうか?
- 人が欲しいと思うもの,使われるものとは何か?
といった問を議論する.そしてそれらの課題から自分が欲しいもの/作りたいものを実装・検証する.
新人課題はこちら
2. MIDDLE
石黒氏の研究を発端として,ロボットに対するユーザの印象を評価する研究は盛んに行われてきた.実用的なロボットやツールを研究する場合,システムの定量的評価も必要である.画一された手法があれば理想であるが,実際はシステムの要件やシチュエーションによって,評価軸や手法が変化してしまう.そこで本グループでは,HAIを対象としたシステム評価手法の網羅的なサーベイを行う.蓄積された手法はScrapboxにまとめることで,今後の研究の参考となる評価手法リストの作成を目標とする.
新人課題はこちら
3. Social HRI/HAI
コミュニケーションロボットは,家庭やオフィス,教育現場,介護現場,医療現場など実社会での活躍が期待されている.本グループでは,多数の人やコンピュータ,マシンなどが複雑に関わりあって成立している現実の生活の中に溶け込む多対多のHuman-Robot Interactionをデザインし,以下のコンセプトを実現する.
- ロボットが「新奇性」ではなく「親近性」の点で人々に受容される
- 人同士や人とコンピュータを繋ぐ立場として,ロボットが社会生活内の創発を促す
- ロボットが積極的に行動し,刻々と変化する状況に対処する
これらの実現によって,ロボットとユーザの間の信頼関係が構築され,単に人の仕事を減らすのみならず,状況に応じ人やコンピュータとの連携を含んだタスク(スケジュールに合わせて車を手配する@オフィス,体調が悪そうな人を見つけて介護士を呼ぶ@介護現場,生徒間での教えあいを促す@教育現場 etc.)のプランニングとその実行をロボットが行うことができるようになる.
新人課題はこちら