近年3DCGキャラクタが普及し,対話型エージェントのアバタとして画面内エージェントに使用されつつある,しかし画面内エージェントではモナリザ効果というユーザに対する注視が曖昧になる問題が存在する.本研究では注視対象を瞳に映す手法と背景をユーザに追従させることにより空間の共存感,及び一体感を与える手法を提案する.実験用に注視対象を手動で選択できるエージェントを作成し実験と評価を行った.
ロボットの会話における擬似感情の音声的表現, 桑原多瑛, 堀江拓実, 高汐一紀, 信学技報, vol. 119, no. 81, CNR2019-2, pp. 7-11, 2019年6月.
ロボットと人の会話において,会話の盛り上がりを半減させる要因の一つに音声が単調である事があげられる.人同士の会話では,会話中の音声に感情の変化が現れる.これを踏まえ,ロボットの会話内容に含まれる擬似感情を発話音声により表現する手法を提案する.その場合,会話履歴から感情変化の流れを考慮することでより自然な音声になると考えられる.実装したロボットの音声により,人とロボットとの会話でコミュニケーションの円滑化が見られるかを検証する.
Open Research Forum 2019
ModuRo ソフトロボットのためのプロトタイピング環境
展示代表者:真島大樹
工場を主な活躍の場としてきたロボットが,今や生活の中でありふれた存在になろうとしています.一方,従来の硬く力強いロボットは,共に人間と協同する際に凶器となったり,恐怖心を煽るものでした.そこでロボットの構造や外装,アクチュエータにやわらかさを付与する試みがソフトロボットです.ソフトロボットはサービスロボットのみならず,バイオメカニクス領域への応用も期待されていますが,これまでは簡単なプロトタイピングが困難でした.本研究では,ソフトアクチュエータを備えたモジュラーロボット“ModuRo”を開発し,ソフトロボットの円滑なプロトタイピング環境を提案します.
Video Gaming with a Virtual Rival Player
展示代表者:清本信介
コンピュータゲーム用ハードウェアの進化に伴い,エンタテインメントは常に革新を続けている一方で,ディスプレイを使用する対人戦型ゲームの人気も絶大です.しかし多くの対戦型ゲームで用意されている対NPC戦のプレイモードでは相手が身体性を持たないため,プレイでの満足度が低下することが予想されます.本デモではNPCプレイヤをゲームの進行状況に応じてリアクションや感想をつぶやくロボットに置き換えることで,来場者がロボットとともにゲームに興じ,ゲームプレイに対しての満足度を向上させます.

University n.g.
展示代表者:古谷優樹
SDGsの推進により,MOOCに代表される講義アーカイブの活用が進み,全ての人々が平等に教育を受けられる社会が到来するでしょう.そして,Beyond SDGsの教育では,真に場所や手段に依拠しないインタラクティブな議論ができる環境こそが求められます.本展示ではVRとテレプレゼンス技術を密に連携させた「未来の大学」のコンセプトモデルを示し,その核となる次世代テレプレゼンスロボットのプロトタイプを展示します.
ロボットによる対話割込み制御のための会話管理モデルの提案, 堀江拓実, 高汐一紀, 信学技報, vol. 119, no. 81, CNR2019-11, pp. 55-60, 2019年6月.
ロボットが実社会で使われる場合,第三者による現在進行中の会話への割込みを考慮する必要がある.特に,それまでと無関係な内容の会話をロボットと行うための割込みの場合,ロボットは割込み前と後の複数の会話をスケジューリングし実行しなければならない.本研究では,まず実際の人間同士の会話の分析に基づいて割込みに対応するために必要となる会話について整理する.そして,会話コンテキストを定義し,会話コンテキストスイッチングによって複数会話を同時管理するフレームワークを提案する.
v-IoT における連想概念辞書を用いたモノと情報のマッチング, 谷中健大朗, 高汐一紀, 信学技報, vol. 119, no. 81, CNR2019-8, pp. 37-42, 2019年6月.
計算機の低価格化及び小型化やクラウド型情報インフラの整備により,様々な IoT 製品が登場した.近年では,ユーザに対し能動的に生活支援情報を提示する機能を持つ機器も増えている.しし,日用品等,表面的な形状を考慮した情報をモノ自身から提示することは難しく,既にスピーカやディスプレイが搭載されている機器から多種多様な情報が提供されているのが実情である.本研究では IoT 機器化困難なモノを仮想的に IoT 機器化する手法,v-IoT システムを提案,その有効性について検証を行った.
着せ替えによりキャラクタメイクするロボット, 高井陸, 宮本凜太郎, 高汐一紀, 信学技報, vol. 119, no. 81, CNR2019-6, pp. 27-30, 2019年6月.
人は人形に衣服の着せ替えを行うことで,その人形にキャラクタ性を与える.コスプレもまた同様に、 外見から自身のキャラクタを作り出す行為であろう.パーソナルロボットにおいては,外見のカスタマイズの意 義やその心理的影響に関して議論されてこなかった.本研究では,ユーザがロボットの外装を付け替えることで, ロボット自身がキャラクタを意図的に変化させるロボットを実装し,着せ替えという行為によりロボットに対し 愛着が高まるか,および他人のロボットとの違いを感じるかを評価する.
援助行動を促進するロボットモーションライブラリの検討・分析, 大平麻以, 谷中健大朗, 渡辺巧登, 高汐一紀, 信学技報, vol. 119, no. 81, CNR2019-5, pp. 23-25, 2019年6月.
人との共同作業を可能とした協働型ロボットの開発が進み,ロボットの設計において人とのインタラク ションが重要視されるようになった.特にロボットの能力では対処できない仕事は,人の介入を要求する動作が不可 欠である.そこで本研究では,乳幼児に抱く不完全さに着目,該当する複数の要素をロボットのモーション動画とし て作成し印象評価を行った.実験結果から最終目標であるロボットへの支援を引き出すモーションライブラリの作成 を目指す.
Sociable Robots Lab 説明会
今年度より、高汐研究室(Sociable Robots Lab)では研究室の体験・説明会を行います。
当日は高汐教授と研究内容について相談できる場も設けます。
秋学期からの履修を考えている方、気になっている方は是非ご参加ください!

- 日時 : 2019年7月18日(木) 6限(18:10 – 19:40)
- 会場 : 慶應義塾大学 湘南藤沢キャンパス Κ12
- 参加費 : 無料
- 内容
- Sociable Robots Labとは?
- 履修についての説明
- 所属学生の研究テーマ説明・デモ実演
- 履修や研究テーマの相談
Social HRI/HAI 新人課題
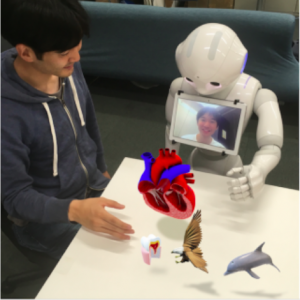
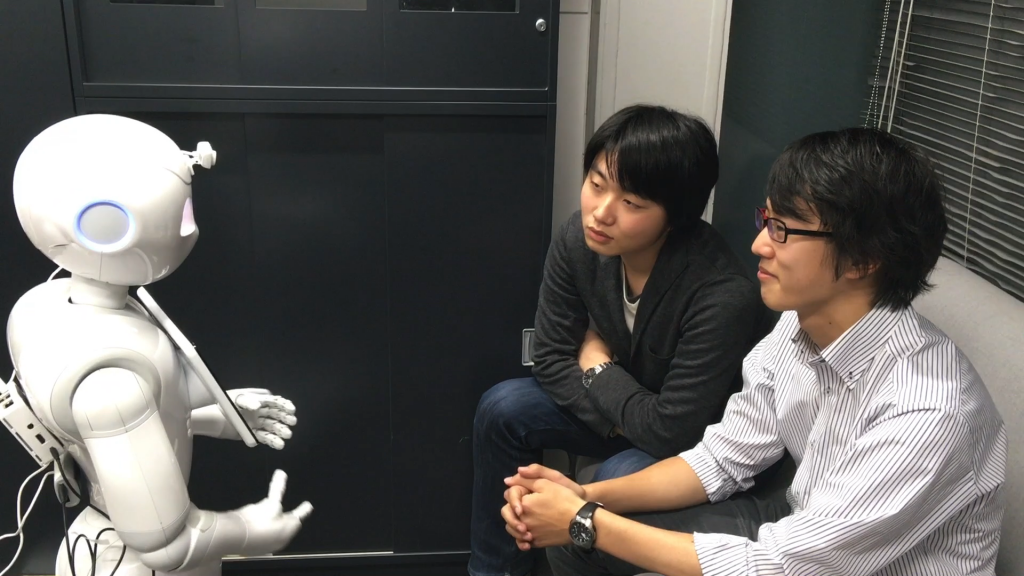
Who Are You Talking to?
課題内容
二人のユーザとPepperが会話をしている想定で,Pepperにインタラクションの状況を理解する様々な機能を追加する.
- 悲しい表情をしている人の方を向く機能
- 人が話していることを検知する機能
- 誰が話しているのかを推定する機能
- 人がPepperともう一人のユーザのどちらを見ているのかを推定する機能
- 「誰が誰に向かって話しかけているのか」を推定する機能 (extra課題)
…人が話している間,最も話者が向いていた方向の人(ロボット)が話しかけられている対象とみなす
実装環境
- Softbank Robotics 社 Pepper
- Choregraphe (GUIを使ってPepperのプログミング開発ができる)
- Python 2 (Choregrapheのプログラムをカスタマイズするのに使用)
目的
- 画像情報や音声情報からコミュニケーションに関する情報を取得する体験をする
背景
- ロボットが人とN対Nの対話をするには,人が誰に向けて話しているのかをロボットが認識する必要がある
- 既存研究では,視線(または視線の近似値として頭部の向き)や発話の韻律情報(ロボットに対してはゆっくり喋るなど),体の揺れ,発話内容などをもとに,人が誰に対して発話を行なっているかの推定が行われている.
- 新人課題では,もっとも古典的な手法として,発話中の視線情報をもとに受話者を推定するプログラムをNaoqi上に構築してもらう.
MIDDLE 新人課題
イライラ棒ゲーム
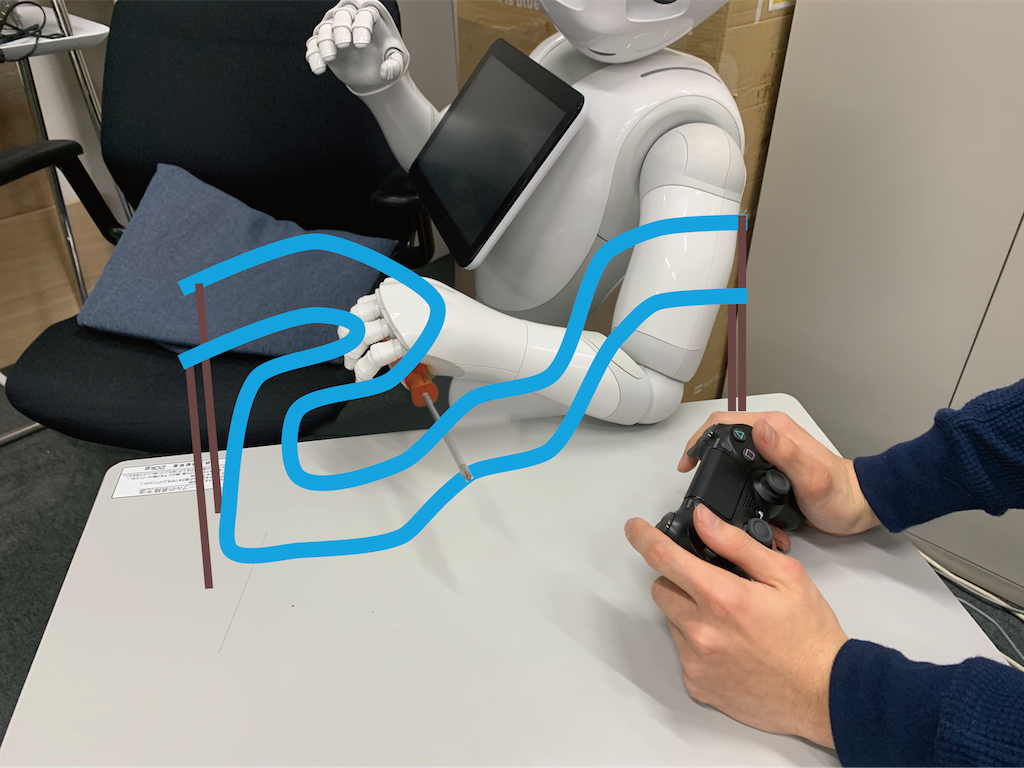
ルール
イライラ棒をするロボットマニピュレーションシステムの制作をします
- 使用するロボットはPepper
- こちらが用意するイライラ棒装置と棒を使用してもらう
- ロボットは各々が作成したマニピュレーションシステムで動かす
- 制限時間は5分
- 枠に当たった場合、並びに棒がスタートとゴール以外からはみ出た場合はその場からやり直し
- 枠に当たる、はみ出るのは5回までとする
使用機材/言語
- Pepper
- コントローラ(以下から選択)
- PS4 コントローラ
- iPad
- Joycon
- Javascript(QiMessaging)
目的
- システムの設計、実装を経験する
- ロボットモーション制作を体験してもらう
- ロボットと他デバイスとの通信について学んでもらう